EcuBus-Pro 快速上手

简介
EcuBus-Pro 是一款强大的开源汽车电子控制单元 (ECU) 通信工具。它旨在为开发者提供灵活的协议交互手段,支持诊断、调试、数据记录及性能优化等多种场景。
核心优势
- 开源免费:降低开发成本,社区持续驱动。
- 卓越交互:直观的 GUI 界面,快速上手。
- 跨平台能力:完美运行于 Windows、Linux 和 MacOS。
- 硬件兼容性强:原生支持 PEAK (PCAN)、KVASER、ZLG、Toomoss,并深度适配 SysMax 的 CAN/LIN 系列产品。
- 全协议支持:涵盖 CAN/CAN-FD、LIN、DoIP,内置脚本自动化与测试框架。
[!TIP] 本文将重点介绍如何在 EcuBus-Pro 环境下使用 PCAN-FD 设备。如需深入了解其他功能,请参考官方用户文档。

环境准备
软件获取
- 前往 EcuBus-Pro 下载页面获取最新安装包。 EcuBus-Pro下载链接:https://app.whyengineer.com/docs/about/install.html

- 安装完成后,启动软件进入主界面。
PCAN 驱动安装
若您的计算机尚未配置 PCAN 驱动,请按以下步骤操作:
- 获取 PEAK-System_Driver-Setup 安装包。
- 运行安装程序并按照向导完成安装。
- 将 PCAN 适配器插入电脑,系统自动识别硬件后即可使用。
EcuBus-Pro 基础操作
步骤一:创建项目
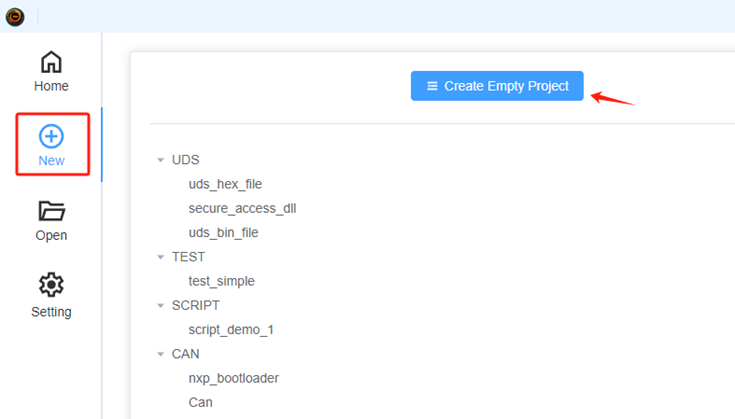
点击菜单栏的 New -> Create Empty Project,创建一个空白项目。
步骤二:硬件通道配置
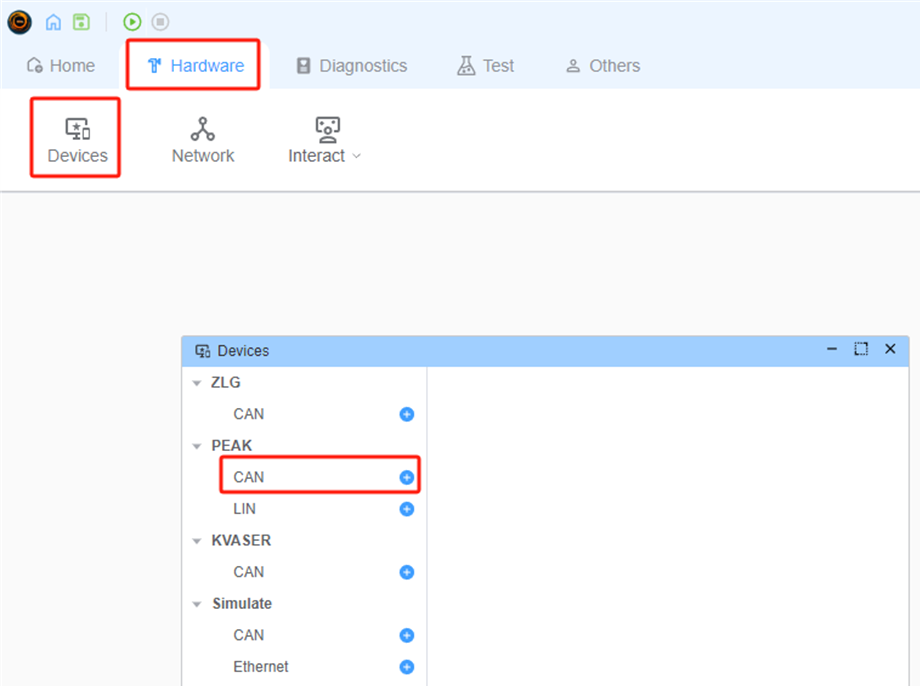
- 点击导航栏的
Hardware—>Devices。 - 在弹出的窗口中选择 PEAK 类型的 CAN 设备。
- 通道绑定:在设备列表中选择对应的物理通道。

步骤三:参数设置(关键)
- 启用 CAN-FD:勾选
CAN FD Enable选项。 - 波特率配置:
- 软件默认提供 500kbits/2Mbits 的组合。
- 注意:若使用其它默认配置的仲裁段与数据段的 PreScaler 可能不一致,在某些复杂拓扑下可能导致通讯不稳定。
 3. 完成设置后,点击
3. 完成设置后,点击 Add Device。
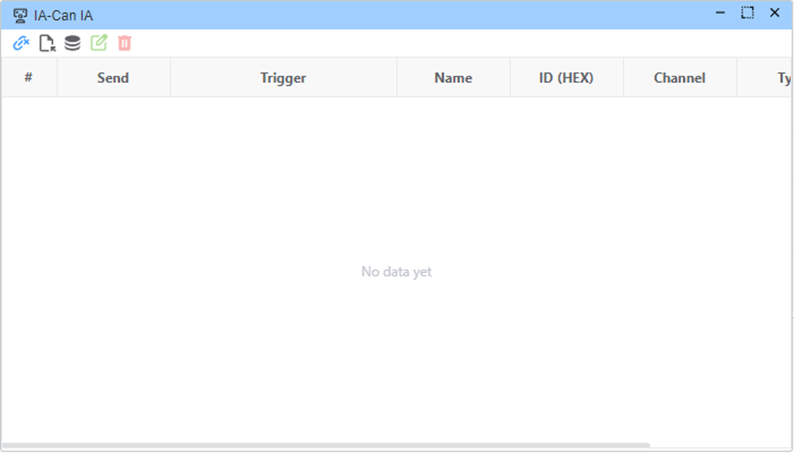
步骤四:配置交互器 (Interactor)
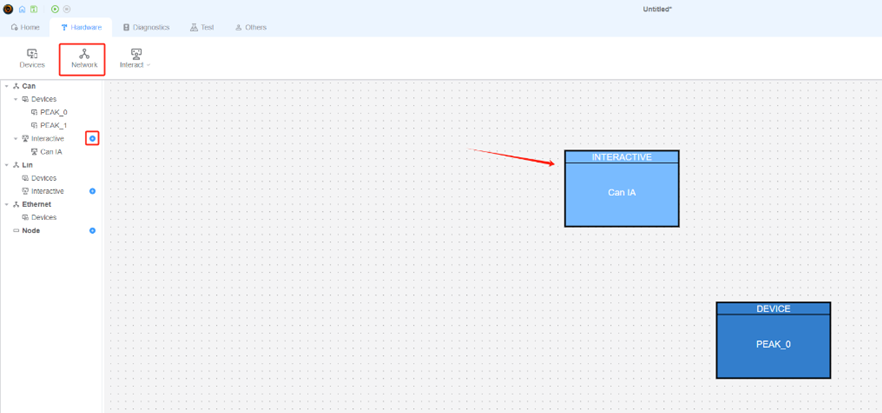
- 配置交互器用于管理和发送报文: 点击
Network选项卡,点击Interactive右侧的 "+" 号,添加一个交互器。
 2. 打开交互器配置窗口,从左到右依次:链接设备、创建帧、从数据库导入、修改帧、删除帧
2. 打开交互器配置窗口,从左到右依次:链接设备、创建帧、从数据库导入、修改帧、删除帧
 3. 为交互器分配设备:点击"链接设备"图标,将左侧可用设备移至右侧已分配列表。
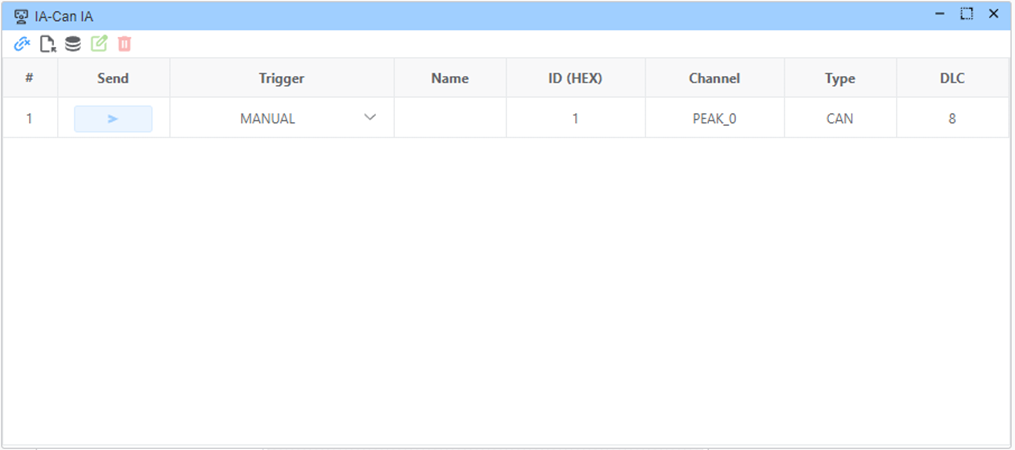
3. 为交互器分配设备:点击"链接设备"图标,将左侧可用设备移至右侧已分配列表。 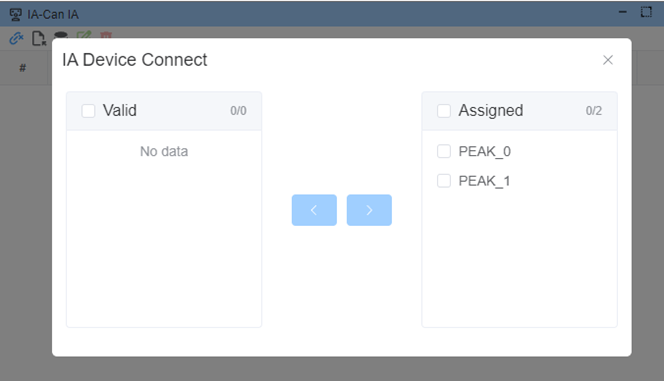 4. 添加帧信息:点击"创建帧",在此您可以编辑:
4. 添加帧信息:点击"创建帧",在此您可以编辑:
- 帧名称、帧 ID、通道、帧类型(CAN/CAN-FD)。
- DLC(字节数)、是否开启 BRS。
- Payload 数据内容及触发条件。
数据收发与监控
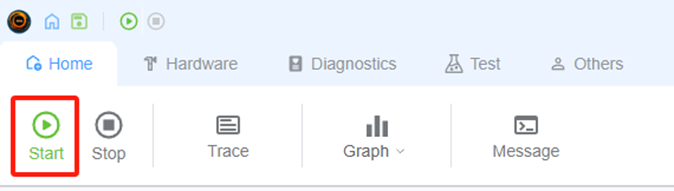
- 开启追踪:点击
Home—>Trace,打开报文监视窗口。
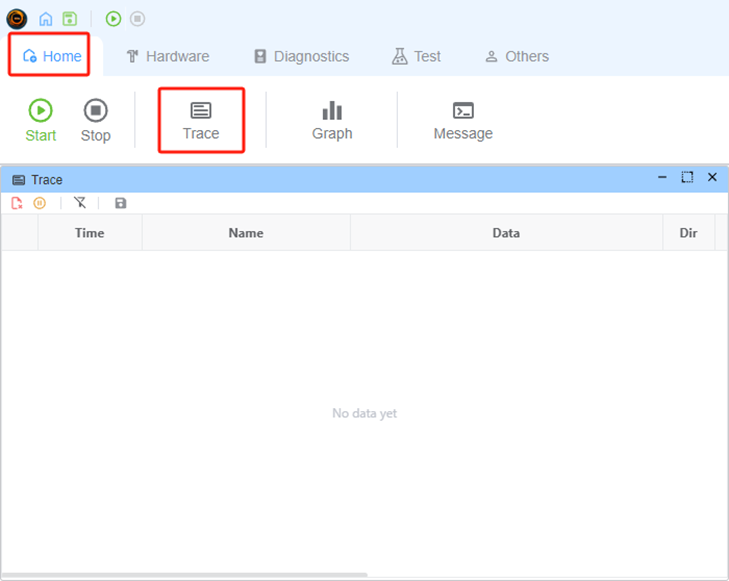 2. 启动设备:点击工具栏的
2. 启动设备:点击工具栏的 Start 按钮。当状态栏提示"设备启动成功"时,表示硬件已进入工作状态。
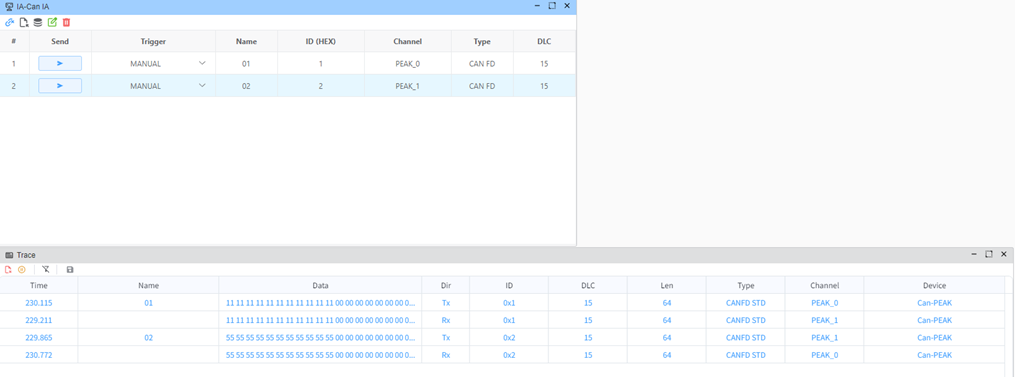
 3. 发送测试:在交互器中点击发送,您可以在 Trace 窗口中实时观测到发出的报文。
3. 发送测试:在交互器中点击发送,您可以在 Trace 窗口中实时观测到发出的报文。
使用技巧——配合 PCAN-View 进行故障排查
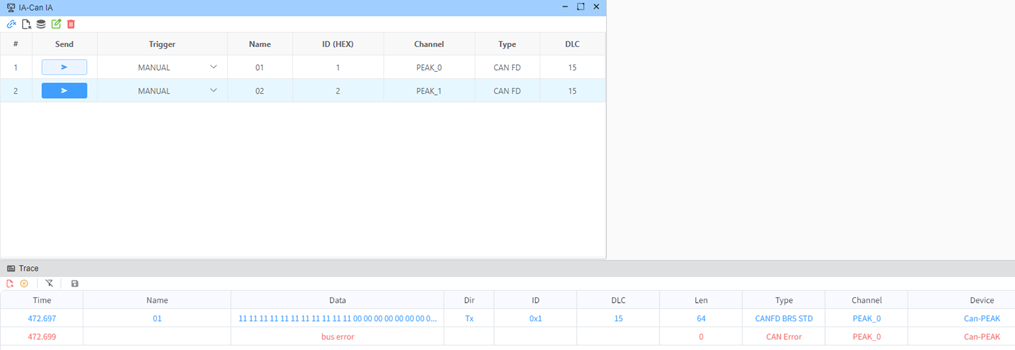
在调试过程中,如果遇到 Bus Error(总线错误),EcuBus-Pro 有时难以直接显示底层的错误帧细节。此时,可以利用 PCAN 硬件的"多客户端"特性进行辅助诊断:
现象示例
当 CAN-FD 节点向标准 CAN 节点发送数据时,会导致错误。
诊断方案
- 保持 EcuBus-Pro 运行。
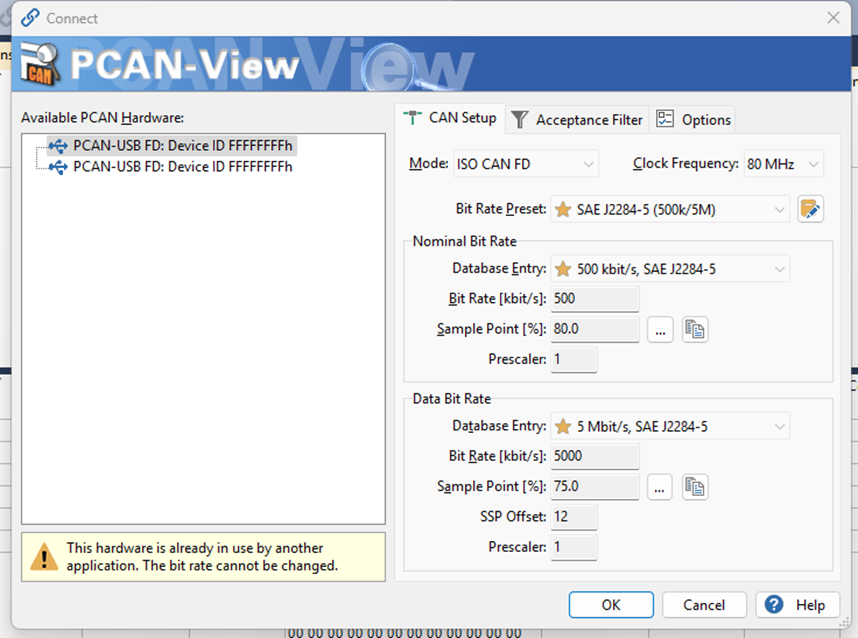
- 同时打开 PCAN-View 软件并选择同一通道。
- 注意:此时 PCAN-View 会提示硬件已被占用,无法修改波特率。直接点击
OK即可进入同步监测模式。
 4. 通过 PCAN-View 的
4. 通过 PCAN-View 的 Status/Trace 界面,你可以清晰地看到"应答错误帧 (ACK Error)"或其他底层错误,从而精准定位链路问题。
